[C48] HandR2N2: Iterative 3D Hand Pose Estimation Using a Residual Recurrent Neural Network
Abstract
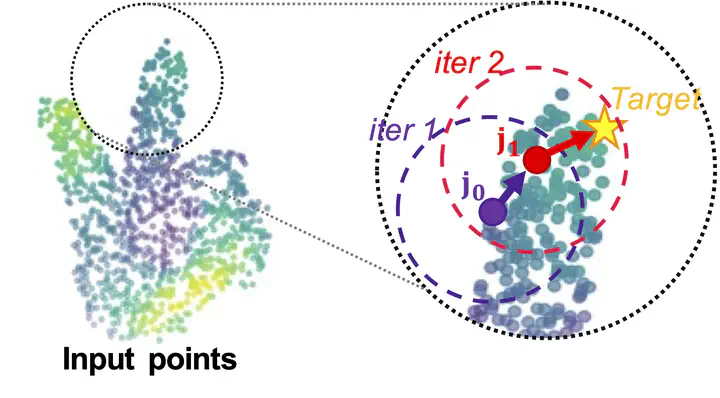
3D hand pose estimation is a critical task in various human-computer interaction applications. Numerous deep learning based estimation models in this domain have been actively explored. However, the existing models follows a non-recurrent scheme and thus require complex architectures or redundant parameters in order to achieve acceptable model capacity. To tackle this limitation, this paper proposes HandR2N2, a compact neural network that iteratively regresses the hand pose using a novel residual recurrent unit. The recurrent design allows recursive exploitation of partial layers to gradually optimize previously estimated joint locations. In addition, we exploit graph reasoning to capture kinematic dependencies between joints for better performance. Experimental results show that the proposed model significantly outperforms the existing methods on three hand pose benchmark datasets in terms of both accuracy and efficiency. Codes and pre-trained models are publicly available at url.