[J12] Robust Detection of Small and Dense Objects in Images from Autonomous Aerial Vehicles
Abstract
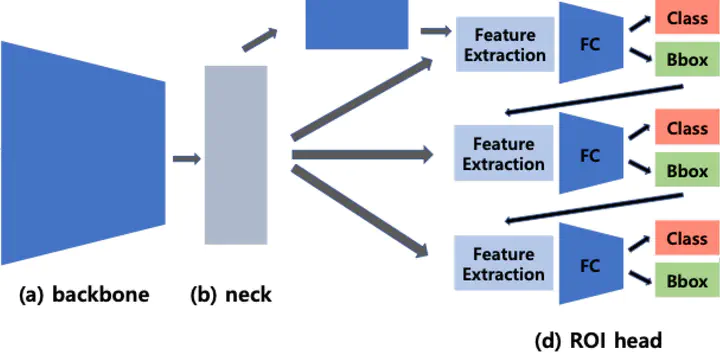
Aerial images obtained from autonomous aerial vehicles have lots of small and densely distributed objects because of the capture distance. This paper proposes a deep neural network architecture and training/inference techniques for robust detection of objects in the aerial images. Based on cascade R-CNN, the proposed model adopts the recursive feature pyramid and switchable atrous convolution for robust detection of dense objects. A patch-level division and multi-scale inference techniques are applied to effectively detect small objects. The results show that the proposed approach achieves the highest performance on the VisDrone test-dev dataset, in the official ECCV VisDrone2020-DET challenge.
Type
Publication
IET Electronics Letters